23 сентября на Куйбышевской дороге завершились тестовые испытания многофункционального надводно-подводного робота "Глайдерон", предназначенного для диагностики опор железнодорожных мостов и мониторинга рельефа дна.

Подводный робот разработан учеными Самарского государственного технического университета совместно с ООО "Экран" и научно-производственной компанией "Сетецентрические платформы". По заказу КбшЖД в этом году самарские разработчики дополнили базу данных "Глайдерона" сведениями о железнодорожных мостах и бетонных конструкциях. Тестовые испытания проводились в Самарской области на реке Сок, через которую проходит железнодорожный мост. В течение трех дней специалисты вуза и сотрудники Самарского центра диагностики и мониторинга инфраструктуры при помощи "Глайдерона" обследовали состояние опор железнодорожного моста, нижние части подводных конструкций, а также изучили степень заиленности дна в районе опор.
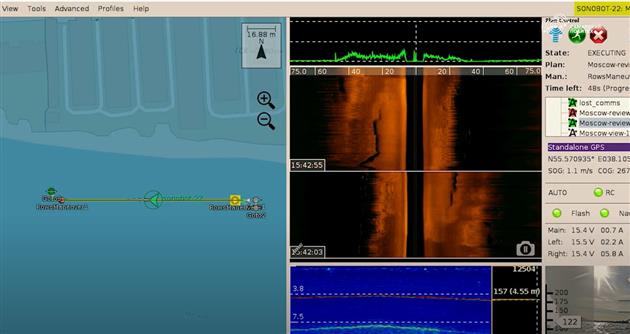
"Пробные испытания проводились с целью изучить возможности инновационного оборудования, тактико-технические характеристики беспилотного аппарата. После обработки информации с аппарата мы увидели на экране монитора графическое изображение опор моста, их состояние, а также рельеф дна в районе опор. Важно было понять, есть ли трещины на опорах или дефекты. Исследования показали, что боковые поверхности опор гладкие, нарушений в конструкциях нет, а на картах глубин также отмечено удовлетворительное состояние нижних частей опор", - рассказал главный инженер Самарского центра диагностики и мониторинга устройств инфраструктуры Дирекции диагностики и мониторинга ОАО "РЖД" Сергей Хмелев.

Испытания показали, что "Глайдерон" хорошо держится в надводном положении, может маневрировать, погружаться и в автоматическом режиме передавать данные на компьютер оператора. Кроме того, он оснащен специальным акустическим оборудованием, гидролокаторами бокового обзора и эхолотами.
Один день ушел на подготовку оборудования и получение данных о территории исследования, два следующих дня "Глайдерон" изучал подводную часть железнодорожного моста. В результате специалистам удалось составить карту глубин и рельефа дна вблизи от железнодорожного моста. Кроме того, было получено акустическое изображение самих железобетонных опор.
По словам одного из разработчиков, инженера-программиста регионального учебно-научного центра по проблемам защиты информации региона Среднего Поволжья РУНЦ "Информационная безопасность" Екатерины Пантелей, под водой обычные камеры неэффективны, так как чаще всего диапазон видимости в реках России составляет от 20 сантиметров до двух-трех метров. "Акустическая полезная нагрузка "Глайдерона" позволяет видеть в реке Сок на глубине до 60 метров", - отметила специалист.
По итогам практических испытаний специалисты планируют модифицировать "Глайдерон", улучшить качество удаленного управления аппаратом. Для этого разработчики модернизируют программную часть аппарата и системы связи. Кроме того, инженеры планируют изменить конструкцию лодки, чтобы сделать ее более маневренной на поворотах.
После модернизации тестовые испытания будут продолжены уже на крупном инфраструктурном объекте - в районе Александровского (Сызранского) моста через Волгу. Их планируется провести до конца года.
Стоит отметить, что диагностические исследования опор железнодорожных мостов проводятся один раз в 10 лет специалистами водолазно-обследовательской станции Московского регионального центра диагностики и мониторинга устройств инфраструктуры. В этом году пришло время исследовать Александровский мост, и применение инновационной техники укорит процесс.

















